|
|||||||||||||||||||||||||||||

![]()
|
Gyroscope et centrale à inertie Comment les toupies peuvent devenir utiles. |
Personnage
des studios Disney (1952)
|
|
||
|
|
|
|

|
|
||
|
En
maths, l'opération de cumul s'appelle une intégration. Elle est
opérée sur l'accélération du mobile captée par des accéléromètres très
précis. Une
première intégration donne la vitesse
du mobile par rapport au sol:
Une
seconde intégration fournit la position:
|
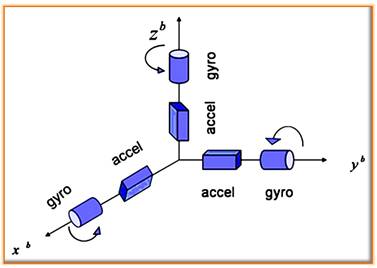
Schéma de principe Trois gyroscopes
et trois accéléromètres dans un trièdre trirectangle.
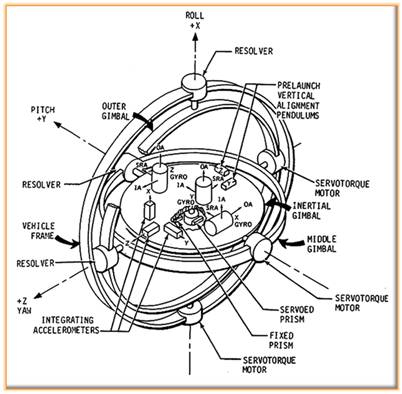
Schéma de réalisation
Source
Nasa
et Wikipedia |
|
|
Sur un sous-marin nucléaire en immersion
durant des mois, cet instrument est bien entendu critique car c'est le seul moyen pour connaitre sa
position. Un recalage de position est possible si le commandant du sous-marin
accepte de monter en surface et de déployer son mât de visée astrale, au
risque d'être repéré par un bâtiment de surface voisin ou un avion de
patrouille maritime. |
Centrale inertielle de sous-marin
Centrale inertielle d'avion
|
|

|
|
||
|
Le
guidage inertiel est une technique de navigation; Elle
utilise des détecteurs d'inertie permettant le guidage d'un véhicule d'un
endroit à un autre, sans aide ni influence extérieure. Trois
accéléromètres mesurent l'accélération et trois gyroscopes détectent les
changements d'attitude ou de direction du véhicule. Plate-forme stabilisée:
elle est montée à la Cardan. Trois gyroscopes maintiennent la plate-forme
alignée dans les directions d'origine (repère lié aux étoiles lointaines, par
exemple). Moteurs de correction d'attitude (assiette,
roulis et tangage): les mouvements des cardans sont détectées et compensés à
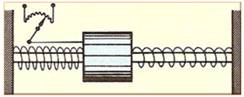
l'aide de petits moteurs électriques. Accéléromètre: il s'agit d'une masse placée entre deux
ressorts. La compression des ressorts est proportionnelle à l'accélération.
La connaissance de l'accélération sur la plate-forme sabilisée
permet le calcul de la vitesse et de la position. Dérive: il existe de nombreuses sources
d'imperfections et la position indiquée par la centrale inertielle dérive. Un
recalage est nécessaire périodiquement. |
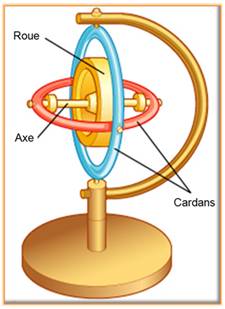
Montage à la Cardan
Anglais: gimbal Accéléromètre
On mesure la tension délivrée aux bornes du rhéostat fonction du
déplacement de la masse attachée aux ressorts. |
|
{kind=link}
Un exemple de montage de centrale inertielle (principe)
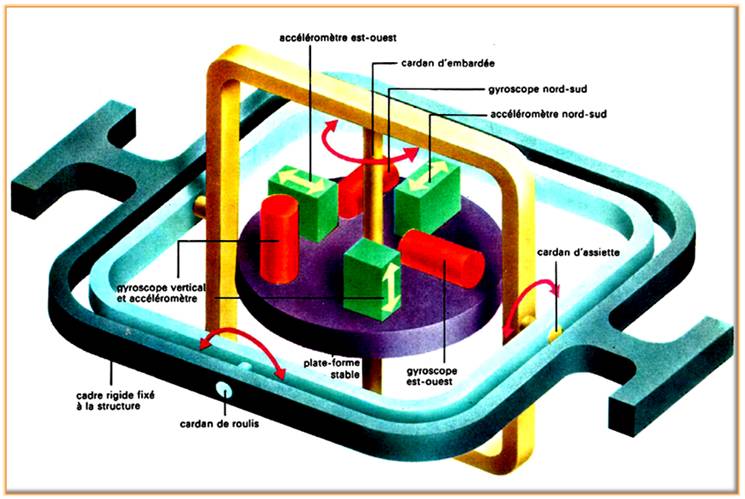
Source: Comment ça marche, éditions Atlas
1979
|
|
|
|
Les
bases de la navigation inertielle furent établies en 1852 par Léon Foucault qui montra qu'on pouvait
mesurer la rotation de la Terre grâce au
principe de fixité du gyroscope pointé sur une étoile. En
1908, Anschütz Koempfe
fabriqua un gyrocompas pour navires. Il ne fonctionne pas lors de virages.
Max Schuller le perfectionne en y associant un système de détection de
vitesse. Le premier véritable système de guidage à inertie fut monté sur les
missiles V2 allemands durant la seconde guerre mondiale. Dix ans plus tard,
un sous-marin américain, le Nautilus, naviguait sous les glaces de l'Arctique
grâce à un tel système. |
|
![]()
|
Suite |
|
|
Voir |
|
|
Cette page |
![]()