
|
Édition du: 08/01/2025 |
|
INDEX |
LOGIQUE et IA |
|||
![]()
|
Les ROBOTS et les COBOTS Monde fascinant. Beaucoup de prouesses à l'œuvre dans l'industrie.
Quelques spécimens font sensation auprès du grand public. La technologie des
robots permet de décupler certaines performances humaines. Pourtant elle est
encore loin d'égaler l'intelligence,
l'intuition et même certains gestes du quotidien des humains. Où en
sommes-nous en 2015? Le Tchèque Karel Capek
(1880-1938) a utilisé le premier le mot "robot" dans une pièce de
théâtre de 1920 intitulée R.U.R. Les robots s'y substituent à la main-d'œuvre humaine, puis, las d'être
commandés par des hommes, se révoltent et les tuent. Robotique: conception et réalisation de machines
automatiques, de robots. Cobotique ou robotique collaborative: production de robots assistant l'Homme,
en automatisant une partie de ses tâches. Le cobot
est une sorte de robot qui manipule des objets avec l'aide d'un humain.
|
||
|
|
Sommaire de cette page >>> Le
monde des machines intelligentes >>>
Types de robots >>> Bots >>>
Vocabulaire de la robotique >>>
Historique >>> Le
robot Asimo >>> Le
robot Nao >>>
Robots robustes >>>
Taxer les robots? |
Débutants Glossaire |

Humour
|
Papa
installe un nouveau robot assistant personnel à la maison. Papa: Toto, dis-moi ce que tu as fait
aujourd'hui? Toto:
J'étais à la bibliothèque avec un copain. Le robot lui envoie une
baffe. Papa: Tu vois Toto, ce robot détecte les
mensonges,
alors tu as intérêt à dire la vérité. Toto:
Ben, en fait, on regardait des films pornos. Papa: Fiston, ce n'est pas bien. À ton
âge, je ne mentais jamais. Paf, le père reçoit une baffe. Maman: indiscutablement, c'est bien ton
fils. Et paf, la mère reçoit une baffe. |
Voir Pensées & humour
|
|
|
|
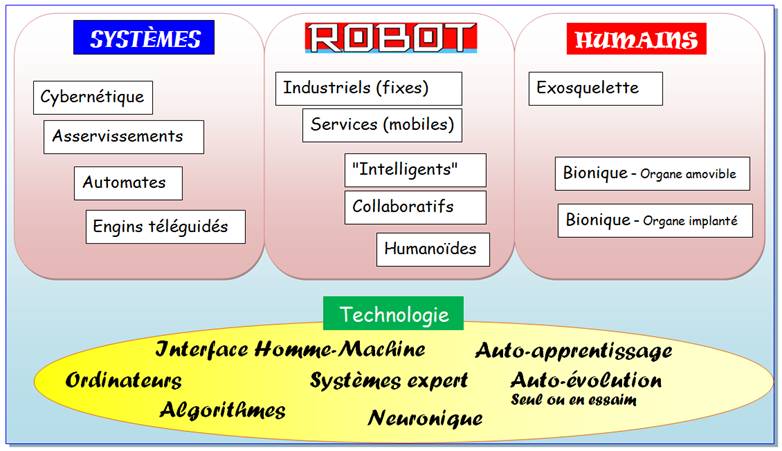
Cette illustration présente trois domaines de la
robotique du simple au complexe.
|
|
|
|
||
|
Capacités
|
Usages
Robots tueurs ou SALA*
|
|
*SALA
|
SALA:
Systèmes autonomes létaux d'armement, ou "robots tueurs". LAWS: Lethal Autonomous Weapon
Systems. |
|
|
||
|
Agent conversationnel Chabot Chatterbot) |
Robot
(agent) de conversation avec un humain. Le dialogue doit être le plus sensé
possible pour simuler un humain. Le test de
Turing consiste à vérifier que le programme réussit l'illusion. Exemples:
ELIZA et ALICE. |
|
|
Androïde |
Ce qui
est de forme humaine: deux jambes, deux bras, un tronc, une tête. De Andr,
l'homme (masculin) |
|
|
Animats |
Comprendre les mécanismes qui rendent les humains autonomes et les
reproduire sur des robots Mot-valise: animal et matériel. |
|
|
Anthropomorphisme |
Attribution
de propriétés humaine à d'autres entités: dieux, animaux, robots, etc. |
|
|
Automate |
Dispositif
capable de comportement automatique, sans intervention d'un humain. >>> |
|
|
Bionique Robot bionique Homme bionique |
Recherche
chez les vivants de modèles applicables à des systèmes techniques, à des
inventions humaines. Biomimétisme Homme
bionique: remplacement d'organes (malades ou amputés ou même sains) par des
éléments cybernétiques. But: amélioration des caractéristiques physiques ou
mentales de l'humain |
|
|
Bots |
Robot logiciel, en fait programme informatique autonome. Agent supposé
rende des services car doté d'une intelligence artificielle. Exemple le
plus connu: les robots logiciels qui patrouille le Net en indexant (notant)
les pages pour leur utilisation par les moteurs de recherche. Ils peuvent
aussi relire un texte et corriger les fautes, vérifier la cohérence des
liens. Ce sont aussi les adversaires informatiques dans les jeux. Autre
utilisation: évaluation des taux de correspondance pour les sites de
rencontre. Etc. |
|
|
Cobot |
Robot
industriel et collaboratif. Il interagit avec les humains tout en
accomplissant ses tâches. |
|
|
Cybernétique |
Science des interactions et communications dans les systèmes complexes
vivants, comme non-vivants. Mécanisme de contrôle: asservissement avec boucle
de rétroaction (feedback). Idée qui
consiste à dire que le tout peut plus que chaque partie prise individuellement
(Ex: jambes + corps + cerveau = possibilité de courir). Les
automates, les ordinateurs, les robots sont des objets cybernétiques. Du grec
kubernêtiké, art de gouverner. prend le sens actuel en 1948 avec l'ouvrage Cybernétique
et Société de Robert Wiener. |
|
|
Cybionte |
Super organisme conceptualisé par Joël de Rosnay. Contrepied de
l'homme augmenté des transhumanistes. Mot-valise: cybernétique et biologie |
|
|
Cyborg |
Organisme
faite de parties organique ou artificiel, doté des fonctions du vivant Organisme
cybernétique Homme
bionique |
|
|
Drone, UAV |
Engin
volant téléguidé. Unmanned Aerial Vehicle. De
l'anglais: faux-bourdon. >>> |
|
|
Exosquelette |
Robot
enveloppant l'homme de manière à décupler ses capacités. |
|
|
Haptique Kinesthésie |
Technologie
relative à la sensation tactile, pression, force, vibrations, mouvement de
l'objet touché, etc. Moyen et interface
procurant la sensation du toucher Du grec
haptikos, le contact, le toucher. Du grec
kinésie, mouvement et esthésie, sensibilité. |
|
|
Homoncule |
Attribution
péjorative de qualités humaines. Réplique
de l'être humain (créé par l'alchimie). Petit
homme imaginaire doué d'un pouvoir surnaturel. Golem (mythologie juive). |
|
|
HRI |
Human
Robot Interaction; interaction homme robot. Il existe
un symposium annule faisant le point sur ces recherches. Papiers présentés disponibles en pdf. Les trois lois
d'Asimov sont préfiguratrices de ces recherches. |
|
|
Humanoïde |
De forme humaine. Asimo est un robot humanoïde. Ne pas
confondre avec hominidé
(primates) et hominoïde (famille de primates: singes anthropomorphes et homo
sapiens) |
|
|
Mécanotronique |
Mot-valise: mécanique +
électronique + informatique |
|
|
Robot, robotique |
Système programmé
pour exécuter des actes basés sur l'intelligence artificielle. Du
tchèque robota, travail, corvée (1921) |
|
|
Transhumanistes L'homme augmenté |
Qui pensent améliorer les caractéristiques physiques et mentales des humains
en utilisant les biotechnologies. Le
transhumanisme (symbole H+) est un mouvement international culturel et
intellectuel. Le journal Le
monde résume ainsi: un jour, l’homme ne sera plus un mammifère. Il se
libérera de son corps, ne fera plus qu’un avec l’ordinateur et, grâce à
l’intelligence artificielle, accédera à l’immortalité. |
|
|
VGA ou AGV |
Véhicules
à guidage automatique.
Robot qui
se déplace seul sans intervention humaine. Ex: approvisionnement d'une chaine
de montage) Quatre
types: chariots, chariot élévateurs, transporteur de charges et véhicule de
tractage. |
|

|
|
||
|
Héron d'Alexandrie (10-70) |
Savant
grec du premier siècle. Célèbre
pour sa formule de
calcul de l'aire d'un triangle quelconque. Traité des
automates: il y décrit des mécanismes destinés au théâtre. |
|
|
Al-Jazari (1136-1206) |
Artiste
et savant arabe. Il
invente un calculateur analogique, des humanoïdes mécaniques programmables. |
|
|
Leonard de Vinci (1452-1519) |
Construit
un robot humanoïde: un chevalier automate qui bouge les jambes et les
mâchoires. |
|
|
Jacques de Vaucanson (1709-1782) |
Génial
inventeur français Nombreux
automates. Son premier fut un joueur de flûte. Son plus célèbre: le canard
qui boit, mange, s'ébroue … Perfectionne
les métiers à tisser. Ce qui va inspirer Jacquard quelques années plus tard. |
|
|
1936 |
Alan Turing (1912-1954) |
Mathématicien
et informaticien britannique Il décrit
un concept de machine capable de résoudre tous les
problèmes mathématiques. Préfiguration des ordinateurs et des programmes du
futur. Voir Histoire des ordinateurs / Histoire
de l'informatique |
|
1941 |
Isaac Asimov |
|
|
1943 |
W. McCulloch W. Pitts |
Modèle de
neurones artificiel. |
|
1948 |
Norbert Wiener (1894-1964) |
Publie:
Cybernetics et crée une nouvelle discipline scientifique, l'art du contrôle >>> |
|
1950 |
Alan Turing |
Il propose le test de Turing: pour
réussir le test, la machine doit être confrontée (conversation anonyme) en
aveugle à un humain sans qu'une tierce personne puisse distinguer qui est
qui. |
|
1957 |
Frank Rosenblatt (1928-1971) |
Inventeur
du perceptron, premier réseau de neurones. |
|
1958 1972 |
John McCarthy (1927-2011) Alain Colmeraurer |
Inventeur
du langage LISP Inventeur
du langage PROLOG Voir Récursivité |
|
1964 à 1966 |
Joseph Weizenbaum |
ELIZA: programme informatique qui simulait un
psychothérapeute. sa conversation reformulait les questions ou en posait de
nouvelles. |
|
1965 |
Stanford |
Début des
systèmes "expert". D'abord dédié à la
chimie puis à la médecine … |
|
1967 |
Seymour Paper |
Inventeur
du langage LOGO, dit LISP sans parenthèse. On y trouve la fameuse tortue qui permet
une prise en main immédiate du logiciel même par les plus jeunes. D'où le
rôle éducatif de ce langage. (Que j'ai personnellement pratiqué avec mes enfants dans les années
1980). |
|
1968 |
Stanley Kubrik |
Film 2001
l'odyssée de l'espace d'après Arthur C. Clark L'ordinateur
HAL 9000 y est "intelligent". Il suspecte qu'on veuille le
déconnecter. HAL: Heuristically programmed Algorithmic computer |
|
1969 |
Marvin Minsky (né en 1927) |
Fondateur
avec McCarthy du groupe Intelligence artificielle au MIT. |
|
1970 |
Stanford |
Shakey:
premier robot capable de planifier la manière d'exécuter des tâches
complexes. La presse
(Life) le qualifie de première personne électronique. |
|
1975 1977 1984 |
/ |
Dessin
animé avec le robot Goldorak. Film Star Wars (George Lucas) avec le robot
R2-D2. Film
Terminator (Stanley Kubrick) |
|
1980 |
MIT |
Intelligence
artificielle distribuée (IAD): coopération entre agents (entre robots) |
|
1984 à 2012 |
Lenat et Cuha Cycorp, Inc (Texas) |
Cyc: système cognitif dit classique
qui tente d'assimiler le sens commun. idée: établir une base de connaissances
pour application à l'intelligence artificielle. OpenCyc dernière édition de
2012. |
|
1985 |
S.W. Wilson |
Animats: étude de la "vie artificielle". |
|
1995 |
|
Robotique
évolutionniste: auto-adaptation à l'environnement changeant d'une population
de robots. Sélection des robots les plus aptes à résister. poursuite du processus
en faisant des croisements et des mutations aléatoires. |
|
1995 à 1998 |
Richard Wallace |
ALICE (Artificial Linguitic Internet Computer Entity):
programme de conversation avec un humain basé sur des règles heuristiques
(intuitive). |
|
1996 |
|
Tamagotchis:
animaux de compagnie virtuels. |
|
1997 |
IBM |
L'ordinateur Deep Blue bat Kasparov aux échecs. |
|
1998 |
LEGO |
Lance ses
boites pour construire des robots, mindstorms. |
|
1999 |
Sony |
AIBO
(Artificial Intelligence Robot) qui veut dire ami en japonais Chine
robot de compagnie. |
|
2000 |
|
Approbation pour la
mise en serice d'un robot télécommandé de chirurgie (da Vinci Surgical
System) |
|
2004 |
Epsom |
Le plus petit robot
hélicoptère: 10 grammes pour 7 cm de haut |
|
2005 |
Université Cornell |
Robots
auto-réplicants par empilements de
cubes magnétiques. |
|
2008 |
Pixar |
Wall-E: robot
orphelin dans un monde dévaqté |
|
2012 |
NASA |
Robonaut: un robot
humanoïde à bord de la spation spatiale. |
|
2012 |
Google / Toyota |
Le Nevada accorde
la permission de rouler au milieu du trafic à une voiture sans chauffeur. |
|
2012 |
DARPA / Boston Dynamics |
Pet-proto: robot
humanoïde capable de suater par-dessus les obstacles, d'éviter les tous, de
monter les escaliers … LS3 – Animal de
somme pour le transport de charge en mileiu accidenté (jusqu'à 200kg). |
|
2013 |
Minnesota |
Contrôle d'un robot
volant par la pensée. Les ondes du cerveaux sont captées par des électrodes
posées sur le crâne. |
|
2013 |
Washington |
Contrôle par la
pensée d'un humain par un autre humain. Casques reliés par Internet, l'un a
réussi à faire bouger le bras de l'autre. (First
remote human-to-human brain interface). |

Voir Chronologie
des inventions / Histoire de
l'informatique
Générations – Spéculations de Hans Moravec en 1997
|
1ère
génération – 2010 – Intelligence du lézard; 2e génération – 2020 – Intelligence de la
souris; 3e génération – 2040 – Intelligence du singe; 4e génération – 2050 – Intelligence de l'homme |
|
|
||
|
Robot
humanoïde développé par Honda en 2000.
ASIMO (se prononce ashimo) pour: Advanced
Step In MObility). Actuellement utilisé pour l'accueil des
visiteurs. Nom en
clin d'œil à l'auteur de science-fiction: Isaac
Asimov. Ce mot veut dire "des jambes aussi" en japonais. La version
de 2014 est dotée de mains
sophistiquées: capteurs tactiles et détecteurs de force. Le robot peur saisir
une bouteille et dévisser le bouchon. Il peut marcher à reculons. Il possède
une reconnaissance faciale améliorée Il est capable de s'exprimer par le
langage des signes. |
Versions 2000 / 2014 Taille: 1,20 m / 1,30m Masse: 43 kg / 48 kg |
|

|
|
||
|
Robot
humanoïde développé par Aldebaran
Robotics (France) en 2006.
Proposé
comme plate-forme de développement pour la recherche et pour l'éducation. Multi-usage,
selon la programmation qui sera réalisée. Notamment robot d'assistance aux
personnes âgées. 7 000
exemplaires vendus en avril 2015. |
Taille: 58 cm Masse: 4,8 kg |
|

|
Main
Le 10 octobre 2024, Elon Musk présente une
3e version de son robot humanoïde « Tesla Optimus Gen 3 ». Ce robot possède 11 DOF par main (total 22). Total Un humain possède 72 DOF dont 27 par main. Robot iCub: 53 DOF dont 7 pour chaque main
et 6 pour chaque pied. Robot ASIMO: 34 DOF dont 3 pour chaque main
et 6 pour chaque pied. Tesla Optimus 3: 67 DOF dont 22 par main |

|
|
||
|
Contexte Avril
2015 Chercheurs
franco-américains de l’université Pierre et Marie Curie à Paris et de l’université
du Wyoming à Laramie aux États-Unis. Antoine
Cully (26 ans), Jeff Clune, Danesh Tarapore et Jean-Baptiste Mouret. |
Applications Pour
applications militaires Pour
l'exploration spatiale ou sous-marine Pour les
robots qui évoluent en milieux hostiles (centrales nucléaires) Pour des
tâches complexes dans des zones sinistrées et hostiles, Pour
rendre plus autonomes les robots d’assistance aux personnes. |
|
|
Technologie Robot doté de six pattes (hexapode). Algorithme intelligence artificielle
d’apprentissage évolutionniste. Recherche des alternatives afin de poursuivre sa
tâche après avoir été endommagé. Réaction résultant de son expérience et non sur
la base d'une programmation préalable. La nouveauté de cette technologie: accélération
de la recherche à l'aide d'une "cartographie" des comportements les
plus performants. |
Implémentation Le robot apprend à
marcher en testant toutes les combinaisons de ses articulations (1047).
Tests émulés
sur ordinateur. Sélection de 13 000
comportements les plus adaptés (semblable à la sélection darwinienne du monde
vivant; biomimétisme). Cela fait,
introduction de détérioration sur le robot, lequel va poursuivre son activité
en sélectionnant, suite à un processus par essais-erreurs, le comportement le plus adapté suite à son
expérience mémorisée. |
|
Anglais: Robots that can adapt like
animals « le robot s’adapte, comme un animal
Source:
Le
premier robot qui s’adapte aux pannes en deux minutes – Nathaniel Herzberg – Le Monde – 27/05/2015
|
Trois
formes ou conceptions du futur avec les robots:
Est-ce
la bonne solution?
|
D'après: Taxer les robots? Un non-sens –
Nicolas Bouzou – L'Express – 22 mars 2017
Voir Robots et chômage
![]()
|
Suite |
||
|
Robots |
|
|
|
Voir |
|
|
|
Livre |
|
|
|
Site |
|
|
|
Cette page |
||
![]()